
RADar
- Category: Embedded
- Employer: Personal, University Project
- Project date: 2021
- Project URL: https://www.cosima-mems.de/de/preistraeger/sieger-2021
Project Information
RADar
This was the first project I had done in a larger team where the whole organization was left completely up to us. We had to think of a project we would all like to do, and since Olli and I are avid cyclists, we thought, maybe something in that direction? Cycling in Aachen can be quite dangerous at times. Cycling and bus lanes merge, sometimes the cycling lanes are wedged between cars, or switch sides of the road in the middle of junctions. Adding to that, quite a few parking spaces back into the cycling lane, making cyclists have to be aware of what is going on around them at all times. So we thought it would be a cool idea to make a device that, at a glance, can give you an overview of what is going on behind you. This way the rider can react more quickly and appropriately to dangers in front. This was the idea for RADar.
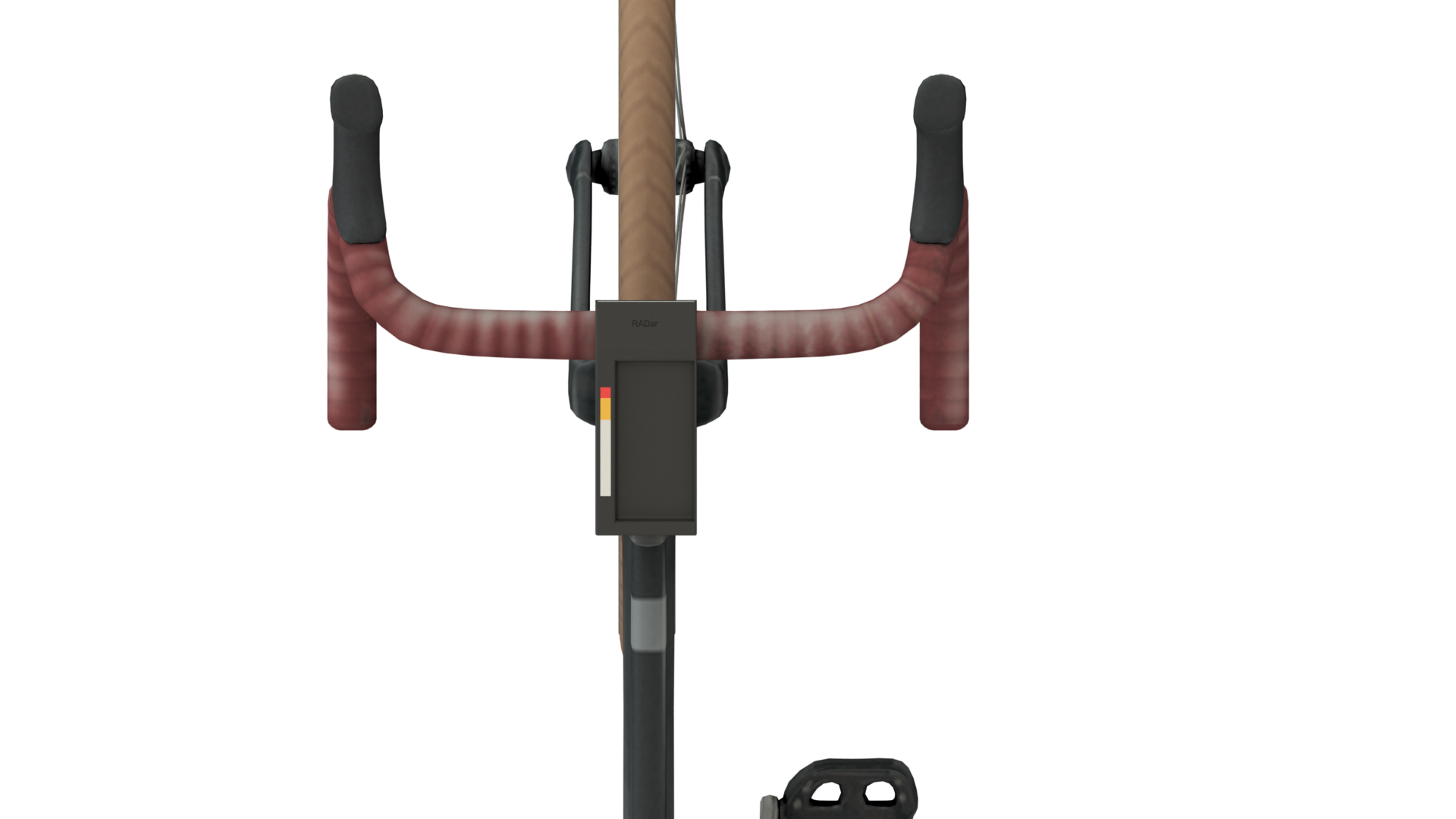
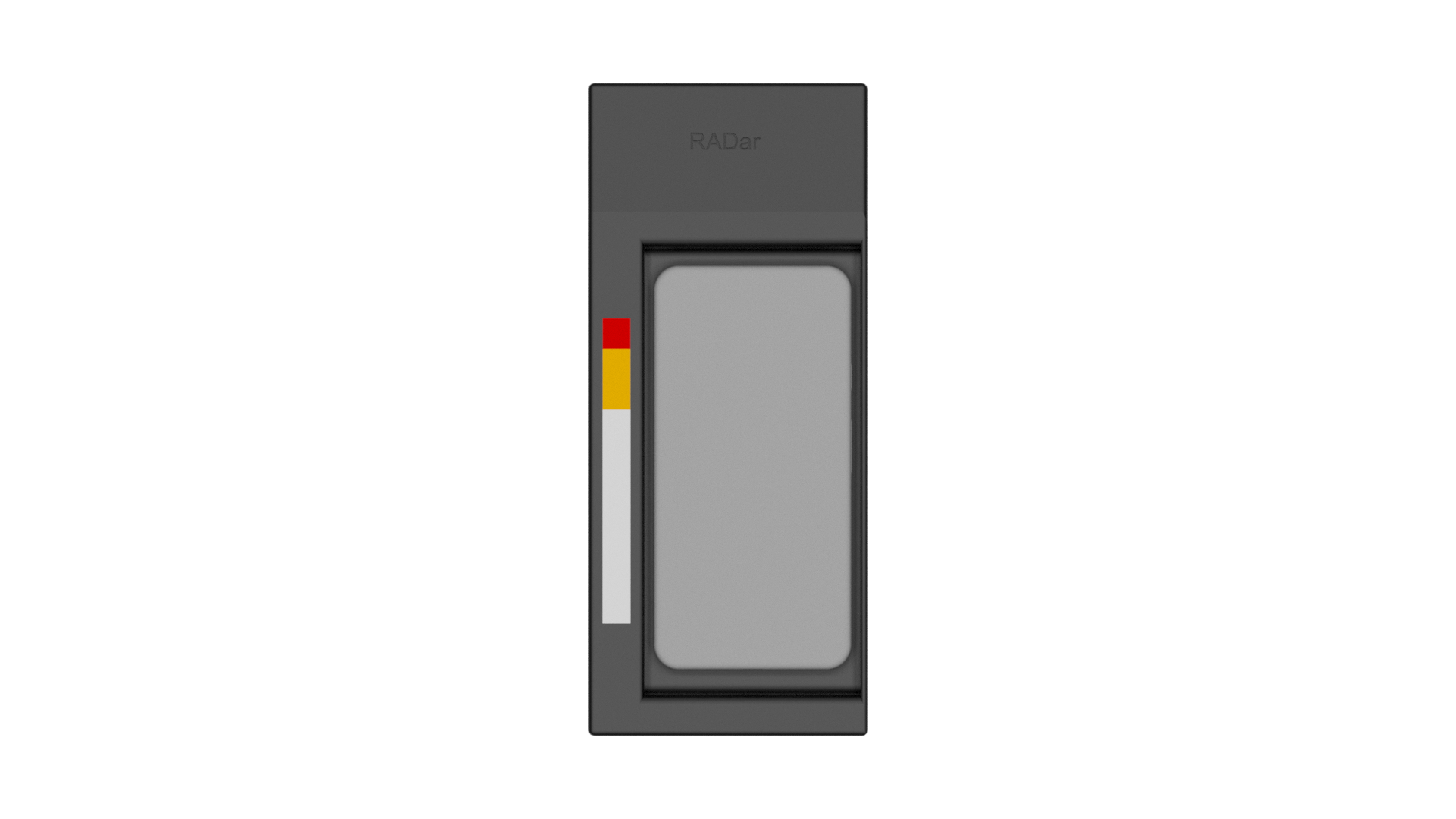
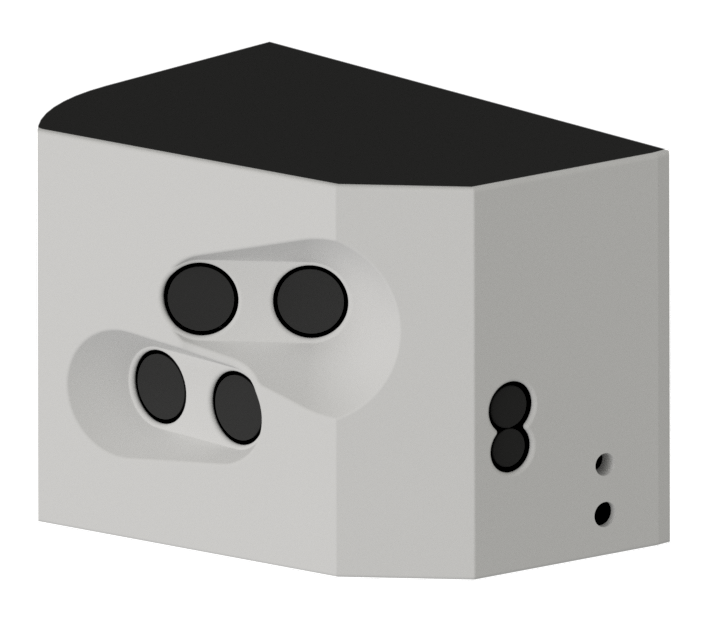
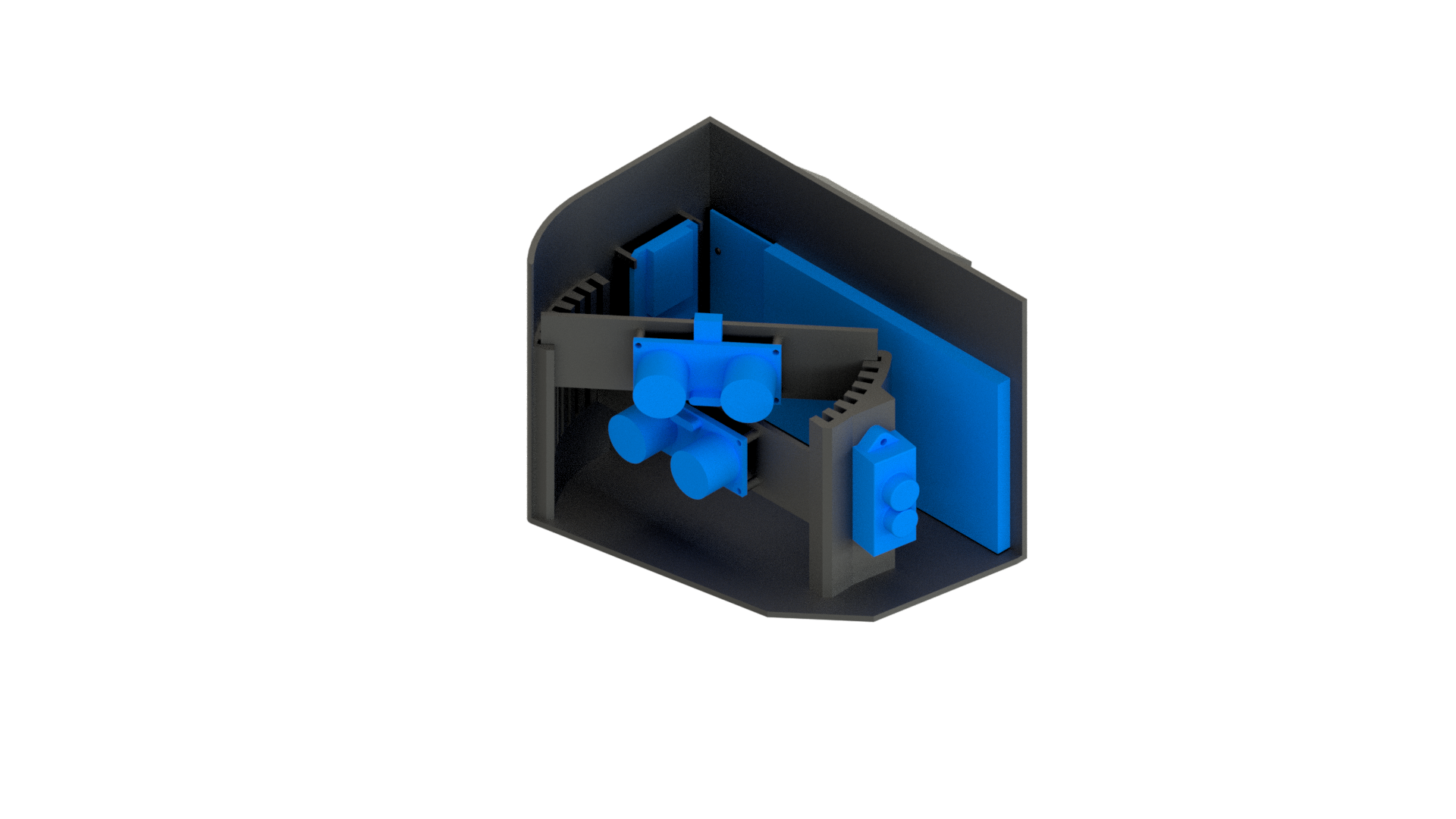
RADar is a German play on words, as "Rad" is a slang word for bike, and since it is a sensor system for bikes, we thought the name was fitting. It consists of a front system and a rear system. The front system is equipped with a camera, an IMU, a danger indicator, and a phone holder. The rear system consists of two ultrasonic sensors and a lidar sensor.
The camera in the front unit constantly captures the last 30 seconds, which is then overwritten if no crash is detected by the IMU. If a crash is detected, then the 20 seconds before and 10 seconds afterward are saved to the Raspberry Pi. The Raspberry Pi also communicates with the ESP in the rear unit and then controls the danger indicator accordingly.
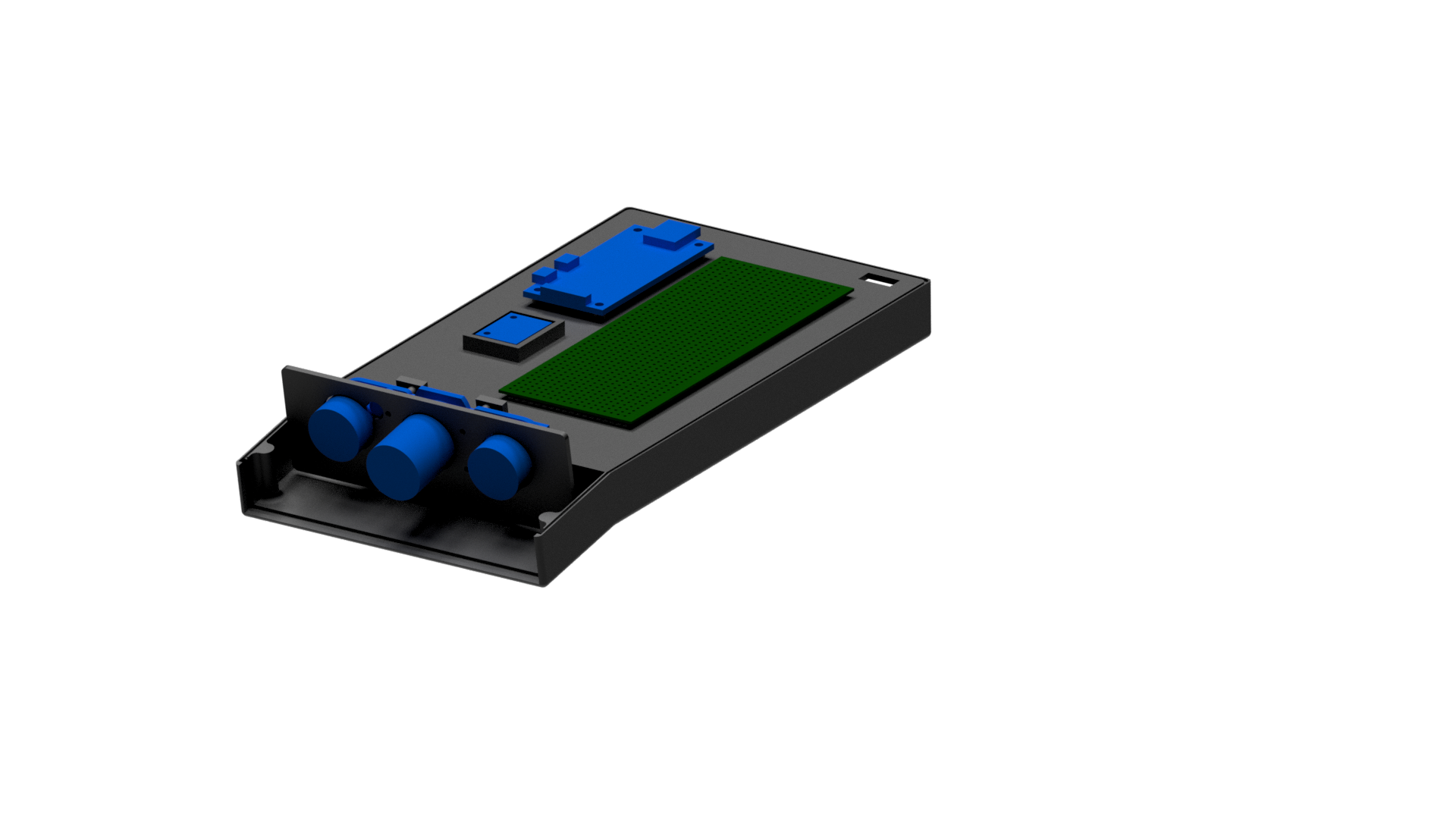
The rear units constantly gather information from the three sensors and then evaluate which is the most important. Due to the limitation of communicating basic information to the user using the LED strip, some logic determines what should be displayed. The three sensors each cover their own zones: the two ultrasonic sensors have wider, close-range coverage, making them better suited for covering the area to the side of the cyclist, while the lidar sensor covers a longer, narrow zone behind the cyclist.
We ended up winning 3rd place at COSIMA with this system, which was a significant achievement for us. However, we still had some ideas for refinement. Olli and I went on to implement these ideas in CitySenses with Martin's additional help.